
議題資訊
在全球追求低碳轉型與智慧交通的浪潮下,神經網路(Neural Networks, NNs) 不僅是汽車科技的進步象徵,更是環境永續與社會責任的有力工具。它們以模仿人類大腦結構為基礎,擁有強大的學習與預測能力,使車輛能在複雜環境中自我感知、判斷與學習。
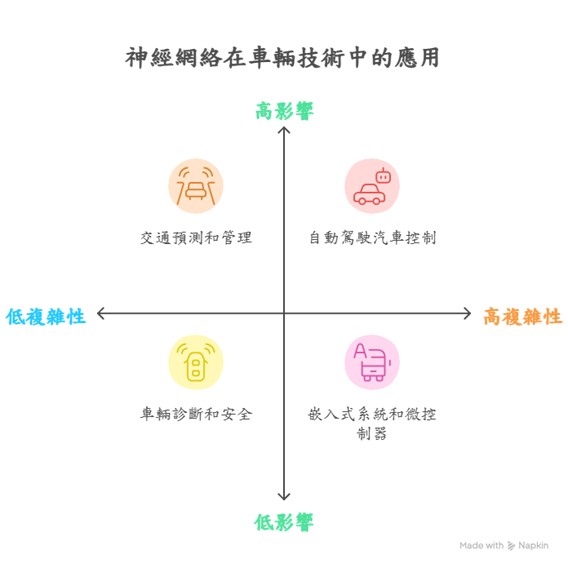
圖片來源:napkin.ai
不論是在電動車節能運算、交通壅塞預防,還是在減少道路事故、強化駕駛安全方面,神經網路的應用逐步深入到車輛設計與營運的每一個角落。當汽車成為行動的資料中心,神經網路將是這場智慧與永續革命的中樞神經系統。
AI 與自動駕駛如何減碳
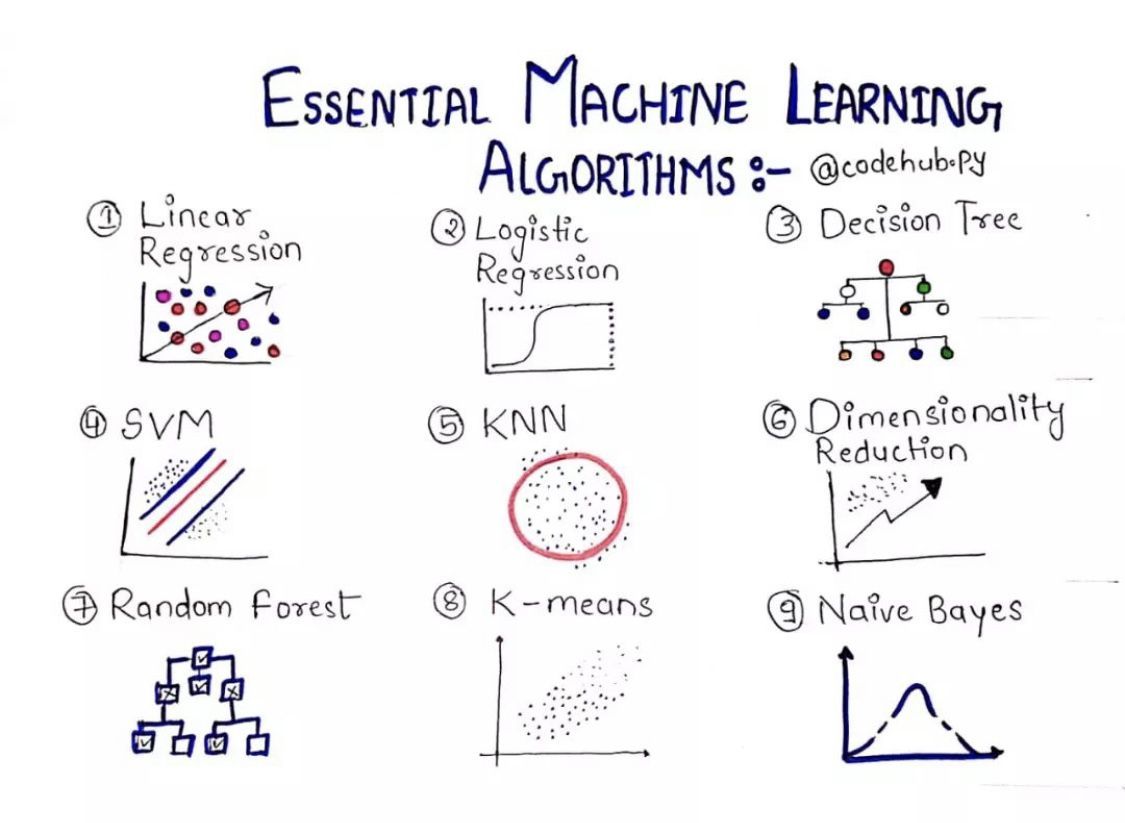
最常見的 7 種神經網路架構及其車輛應用:
1. 前饋神經網路(FNN)
適用於靜態參數的模式辨識與回歸分析,常用於電池壽命預測與引擎效率建模。它的高速計算能力讓電動車管理系統更節能可靠。
應用面:用於估算電動車電池老化程度,有助於延長電池使用年限並減少廢棄污染。
2. 卷積神經網路(CNN)
專為圖像資料設計,常見於自動駕駛的視覺感知模組,如交通標誌辨識、車道線追蹤、障礙物偵測。
應用面:CNN 能讓車輛準確識別兒童、動物、自行車等,保護脆弱交通參與者,並協助避免致命事故。

如果將前饋神經網路(FNN)應用在電動公車上則可以進一步推算電池壽命。
3. 遞迴神經網路(RNN)
可記憶時間序列數據,擅長處理如交通流變化、駕駛行為預測等時間相關任務。
應用面:在智慧城市中,RNN 可分析城市交通歷史資料並進行擁塞預測,進一步減少車輛怠速造成的碳排放。
4. 長短期記憶網路(LSTM)
RNN 的強化版,能更好地處理長時間依賴關係。應用於自動駕駛決策、路徑規劃與多車輛協同行駛控制。
應用面:LSTM 讓車輛記得一段行程內的變化與突發狀況,做出更智慧的選擇與能耗優化。
5. 自編碼器(Autoencoder)
適合異常偵測與資料降維,廣泛應用於車輛診斷系統與資安入侵偵測。
應用面:保護車聯網的安全性,避免資料遭竄改或駭客控制車輛,防止潛在的人為災難。
6. 生成對抗網路(GAN)
結合生成器與判別器,用於生成合成影像、模擬場景、資料擴增。
應用面:可模擬極端天氣條件下的駕駛情境,協助訓練 AI 模型減少車輛在極端氣候中出錯的風險。
7. 多層感知器(MLP)
結構簡單,運算速度快,適合分類與回歸問題。
應用面:用於交通號誌辨識與路徑優化,有助於提高交通流動性並減少因不當路線造成的燃料浪費。
應用場景一:智能交通預測與城市減碳
1. 交通預測與擁塞控制
在車輛臨機網絡(VANET)中,神經網路可即時分析 GPS、車速、氣象與交通事件資料,提供動態路線建議、避開壅塞點,並降低城市碳足跡(Rashid et al., 2022)。
節能效益:少走冤枉路 = 少排廢氣,對都市空氣品質改善影響重大。
2. ITS 系統的智慧決策
結合 CNN 和 LSTM 的模型,智慧交通系統(ITS)可模擬人類司機的判斷行為,提升整體交通網的協調性與效率(Gayathiri et al., 2023)。
延伸應用:UN SDGs 目標 11:永續城市與社區
應用場景二:自動駕駛控制與安全決策
1. 自主導航與突發應變
神經網路整合模糊邏輯,能即時處理動態環境中的大量資訊並做出決策,尤其適用於複雜駕駛場景如十字路口、環狀交叉口與極端天候(Devi et al., 2024)。
永續意義:安全自駕車可減少人為事故與相關的生命損失,也降低因車禍造成的能源浪費與社會成本。
3. 圖像辨識與行人保護
多層感知神經網路(MLPNN)在交通標誌識別、紅綠燈辨識等視覺任務上成效顯著(Rezgui et al., 2019)。
情感面:AI 可即時辨識孩童或寵物意外衝出,提前警示煞車,守護每一個家庭。

近年來台灣自駕車的發展也歸因於AI的各種挹注。
應用場景三:車輛診斷、維護與數據完整性
1. AI 自我診斷
人工神經網路用於監控車輛各項運作參數(如溫度、油壓、電池電壓),偵測潛在故障,協助車主及早維修(Yurii & Liudmila, 2017)。
延伸效益:避免小問題演變為大維修,減少材料與資源浪費,也減少車輛報廢數量。
2. 雷達數據安全驗證
自駕車的大量雷達數據容易出現錯誤,神經網路可驗證數據完整性,偵測速度與傾斜率的異常值(Burza, 2023)。
應用價值:讓自駕演算法更可靠,保證未來的無人車世界不會「眼盲耳聾」。
應用場景四:嵌入式神經網路與微控制器智慧升級
1. 嵌入式 AI 的永續優勢
汽車級微控制器(如 ARM Cortex-M)可部署輕量型神經網路,實現邊緣推論,避免資料傳回雲端造成能耗過高(Crocioni et al., 2021)。
綠色計算:降低資料傳輸與運算資源消耗,實現低功耗、高效率的智慧車輛系統。
2. 電池管理系統(BMS)
神經網路可實時監控電池剩餘容量(SOC)、健康狀態(SOH),並預測充放電行為。
全球意涵:提升電池效率 = 減少電池淘汰 = 減少礦產開採與環境污染。
應用場景五:車輛動態建模與高精度控制
1. 精準建模補足傳統模型缺陷
神經網路擅長非線性建模,適合極端駕駛情境(高速轉彎、煞車鎖死)下的動態預測(El-Gindy & Palkovics, 2014)。
科學進步:不需過度依賴大量實驗測試,即可模擬極端場景,有效減少研發階段的碳足跡與能源浪費。
2. 加速、煞車、轉向的智慧協同
透過感測器資料輸入神經網路,自動駕駛車輛可持續微調動作,實現平穩、節能的路徑導航(Djuric & Houston, 2016)。
體驗升級:乘客可感受到更平穩的駕駛體驗,適用於高齡、兒童與身障者友善車輛設計。
面對的挑戰與前瞻
雖然神經網路為汽車帶來革命性進展,但其應用仍有諸多障礙,如:
1. 高計算負載與能源耗費: 訓練大型模型需大量電力,與「綠色 AI」理念衝突。
2. 模型解釋性弱: 監理單位與車主難以理解 AI 為何做出某決策。
3. 資料偏誤與隱私: 車載系統收集的大量個資需謹慎管理與匿名處理。
為了將技術導向可持續未來,我們應投資於低功耗神經網路模型、開放可解釋 AI 架構以及永續資料治理政策。

如能透過神經網路的多元應用將有助於推動汽車產業提升安全與效能。
結語:神經網路,不只是技術,而是通往智慧、永續與人本未來的橋樑
神經網路不僅是自動駕駛與智慧交通的驅動引擎,更是一種對環境、對人命、對城市未來的深切關懷。當我們賦予車輛以感知與決策的能力,我們也必須賦予它們永續與責任的意識設計。透過技術、倫理與綠色思維的融合,我們可以打造出真正智慧、永續且以人為本的未來車輛生態系統。
參考文獻
l Rashid, S., Khan, M. A., Akram, U., & Saeed, A. (2022).Efficient Future Prediction using Neural Network in Vehicular Ad hoc Networks. https://doi.org/10.1109/SMARTTECH54121.2022.00050
l Gayathiri, N. R., Nithyapriya, S., Malathi, T., Kodieswari, A., & Sabarmathi, K. R. (2023).Neural Network Approaches for Transportation. https://doi.org/10.1201/9781003408468-5
l Devi, J. V., Argiddi, R. V., Renuka, P., Janagi, K., Hari, B. S., & Boopathi, S. (2024).Study on Integrated Neural Networks and Fuzzy Logic Control for Autonomous Electric Vehicles. https://doi.org/10.4018/979-8-3693-1487-6.ch006
l Rezgui, J., Hbaieb, A., Chaari, L., & Maryland, J. (2019).Traffic Sign Recognition Using Neural Networks Useful for Autonomous Vehicles. https://doi.org/10.1109/SMARTNETS48225.2019.9069770
l Yurii, K., & Liudmila, G. (2017). Application of Artificial Neural Networks in Vehicles’ Design Self-Diagnostic Systems for Safety Reasons.Transportation Research Procedia. https://doi.org/10.1016/J.TRPRO.2017.01.024
l Burza, R. M. (2023).Application of Neural Networks for Validation of Data Integrity in Large Automotive Radar Datasets. https://doi.org/10.23919/spa59660.2023.10274466
l Crocioni, G., Gruosso, G., Pau, D., Denaro, D., Zambrano, L., & Giore, G. di. (2021). Characterization of Neural Networks Automatically Mapped on Automotive-grade Microcontrollers.arXiv: Learning.
l El-Gindy, M., & Palkovics, L. (2014). Possible application of artificial neural networks to vehicle dynamics and control : a literature review.International Journal of Vehicle Design.
l Djuric, N., & Houston, J. (2016).Neural network system for autonomous vehicle control.
-
議題資訊

Nissan日產汽車株式會社和Sapporo札幌集團物流公司合作,將共同使用Nissan集團專用貨運渡輪與貨櫃車,進行海路聯合運輸,充分利用回頭空車與回頭空船增加載運效率的新營運概念。
-
議題資訊

台灣的能源討論其實是找到符合自身條件的路徑。 廢水製氫並不是要取代所有氫能技術,而是提醒我們一件事: 能源轉型不一定要從最乾淨的想像開始,而可以從我們每天正在付出成本、正在處理問題的地方開始。
-
議題資訊
.JPG)
在全球加速推動淨零碳排的浪潮下,氫燃料電池車一直被視為能補足電動車不足的重要選項。從政策文件、國際車展到示範運行計畫,氫能經常被描繪成兼具長續航與快速補能優勢的「下一步解方」。
-
議題資訊

台灣電動車暨綠能協會(TEGA)於2025年12月29日假台中全國大飯店舉辦年度理監事大會,並同步舉行會員專屬專家講座與歲末交流活動。活動結合會務成果回顧與產業前瞻議題,邀集產官學研代表齊聚一堂,透過氫能巴士與電動卡車兩大主題,深入探討我國運輸淨零化的政策進程與商用車電動化的實務挑戰。
-
議題資訊

台灣氫能整車系統開發商——氫谷動能股份有限公司,日前於法國巴黎參與 Hyvolution Paris 2026(巴黎氫能革命展),首度以整車層級解決方案對歐洲市場完整展示台灣氫能載具技術實力,吸引歐洲產業鏈與政策圈高度關注。












